スタートゲート 基本プログラム改良
リセット時に常にゲートを開放してUPスイッチでスタート準備のためゲート閉鎖、LEFTスイッチでタイマー計測スタートしゲート開放という状態にしました。
リセット時に常にゲートを開放してUPスイッチでスタート準備のためゲート閉鎖以降は前回と同じです。
タイマー計測時は通過するたびにスタートスイッチを押したときからのタイムを更新し続けます。
続きを読むスタートゲート 基本プログラム完成 全体像公開
ついにスタートゲートに使用する基本プログラムが完成しました。
続きを読む結構いい感じ byワズドル
どうも、ワズドルです。
新マシンの修正に関してはこの前上げたばかりだと思いますが、実際に走らせてみてなかなかこれがいい感じ。
プログラムとハードどちらもそこそこ走るレベルまでに煮詰まったと思う(いろんな条件が重なってたまたま上手く動いてる可能性もあるが)
なんやかんや自分でマイコンカーを一から作り始めてから2年くらい経ちました。
時が経つのは早いですね...年々時間が経つのが早くなっていくのが感じられてちょっと怖いです。
高校のときに多少の経験はあったのですがここまでくるのに遠回りしてしまって時間がかかってしまったなと思いました。
教えてくれる人がそばに居ないのもあってとにかくトライアンドエラーの繰り返しをしてましたね。
まあそれも楽しいんですがねw
◯◯をやりたいといってやらない人達の言い訳として
・ 教えてくれる人が居ない
・ わからない
というのが多いと思うのですが、結局やる人との違いは積極的に自分から動いてるかどうかなんじゃないかと思いますね。
だって最初になにもかもわかってる人なんているわけ無いですし、わからないという問題を自分で解決していくのが大切なんじゃないかと思います。
それに学生だったら先生も居るわけですしわからない技術に関して詳しそうな先生に聞くとか出来るじゃないですか。
インターネットで調べるは大前提ですね。
なんかこういうのを書いていくうちにわからないことがわからないって思ってる人もいそうな気がしてならないのですが、それは失敗を恐れて何も行動を起こしてないだけでは?
だらだら~っと偉そうに書いてしまいましたが結局何が言いたいかというと
失敗も経験のうちだしそれも楽しいしいろいろやっていこう!
ということをいいたかったんです。
すごく脱線してしまいましたが修正したマシンの動画を撮ったので載せておきます。
結構いい感じ
たーのしー!
新マシンの修正
どうもワズドルです
二~三週間ぶりくらいでしょうか?
今回は私の新マシンの一部を作り直したのでそのことについて書いていこうと思います。
まず、なぜ作り直そうとしたのかですが、作り直す前のマシンはなぜか切れ角が足りないのかすぐアンダー気味の走りをしていました。
原因を考え、思いついたのがアッカーマンの比(タイロッドとギアボックスを接続する位置)が間違っていること、そしてキングピンの位置が悪いということでした。
そこで試しにautocadで条件を変えてパラメトリックで実際にどうなるのか見てみました
https://goo.gl/photos/FyR3hxEkDc71524GA
https://goo.gl/photos/Rna7xKSAaf4ZtyDg7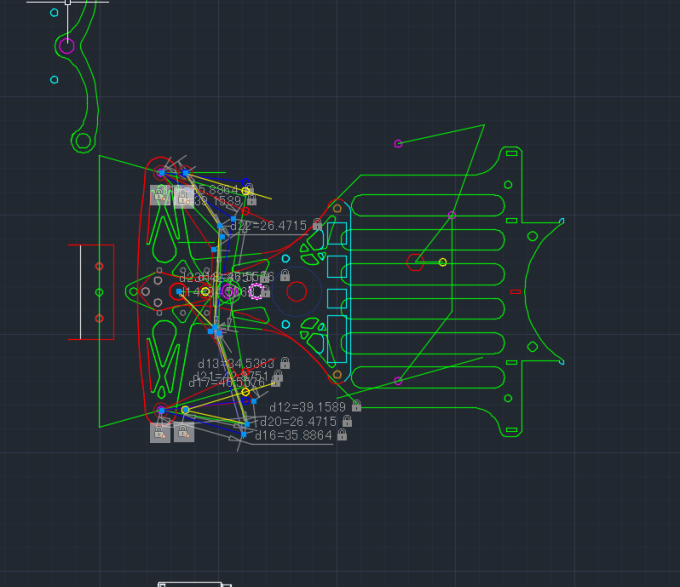
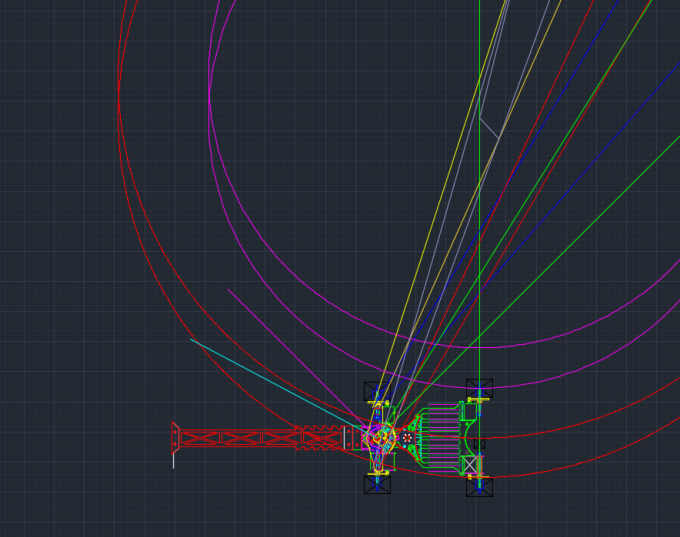
これによって、アッカーマン比(タイロッドとギアボックスを接続する位置)は動かすと比が少なくなり、キングピンの位置を前輪のシャフトの位置に近づけると切れ角が増し逆に離すと浅くなり、結局キングピンの位置が悪いということがわかりました。
ここでふと私の設計方法が間違ってるのではと思い軽くアッカーマンについて調べると...
こんなことが載っていました。
「アッカーマン・ジャントー理論の操舵内外輪舵角の関係を実現するように、ナックルアームやタイロッドのステアリングリンク機構をレイアウトした幾何学的配置のこと。ステアリングリンク配置の平面図で見た場合、車輪の転舵中心軸であるキングピン軸と、ナックルアームのタイロッド側ボールジョイントの中心とを結んだ線が、リヤアクスルの中心を通るように配置すること。」
https://goo.gl/photos/Yqs9f1HUR1jTdWDK6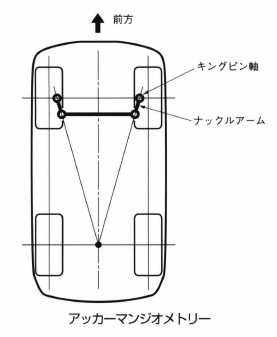
キングピンの位置なんてどこでも良いのかなと私は思っていたのですがどうやら違ったようです。
しかし、フロントの軸の中心上にキングピンを持ってくるいい方法が思いつかなかったのでとりあえず近づけるだけにしました。(だれかいい方法教えてくださいな)
で設計し直し削り出したのがこちら
https://goo.gl/photos/pTexZ54cFsnVoBZT8
修正する前がこちら
https://goo.gl/photos/kKKjpq6hAp4bd3tU8
シャーシだけ見てもわかりにくいので実際にどうなるのか撮った写真も載せます
修正した新シャーシがこちら
https://goo.gl/photos/zjaYdEdHqKiRGmEi6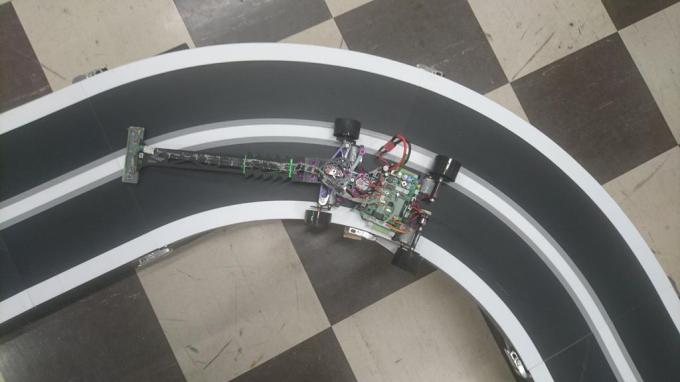
修正する前の低速走行はこちら
https://goo.gl/photos/QgmzizgqU9DsMtsA7
まあ、まだ実際に走れていないのでなんとも言えない状況ですが、写真だけ見るとコーナー内側を走るようになりアンダーも解消されると思います。
これで速く走ってくれればいいなぁ。
あ、あと他の人も自分のマイコンカーを作り始めたのでそのことについても後々だれかが載せていくと思いますのでお楽しみに!